This study provides a framework for a single-camera odometry system for localizing a surgical C-arm base. An application-specific monocular visual odometry system (a downward-looking consumer-grade camera rigidly attached to the C-arm base) is proposed in this research.
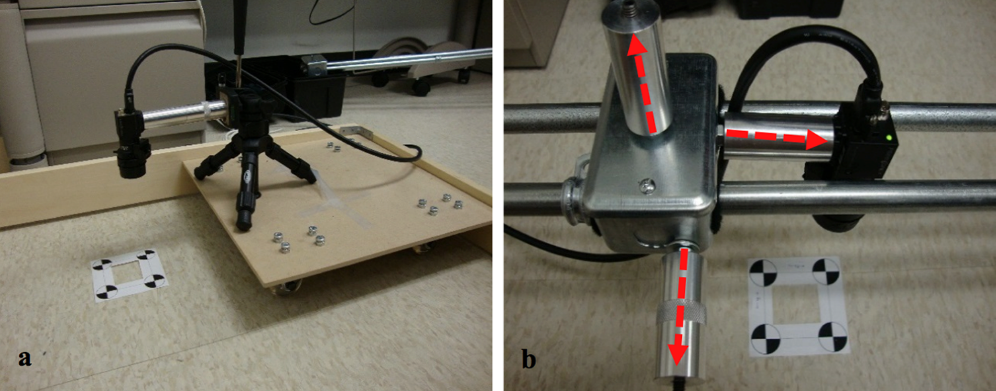
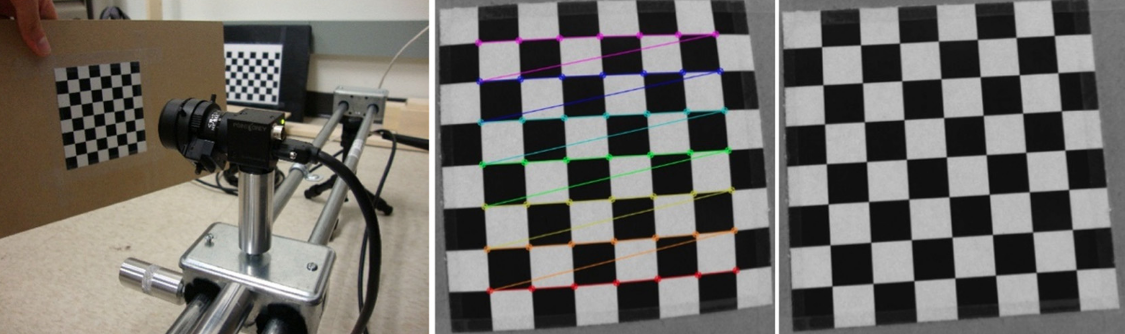
The cumulative dead-reckoning estimation of the base is extracted based on frame-to-frame homography estimation. Optical-flow results are utilized to feed the odometry. Online positional and orientation parameters are then reported.
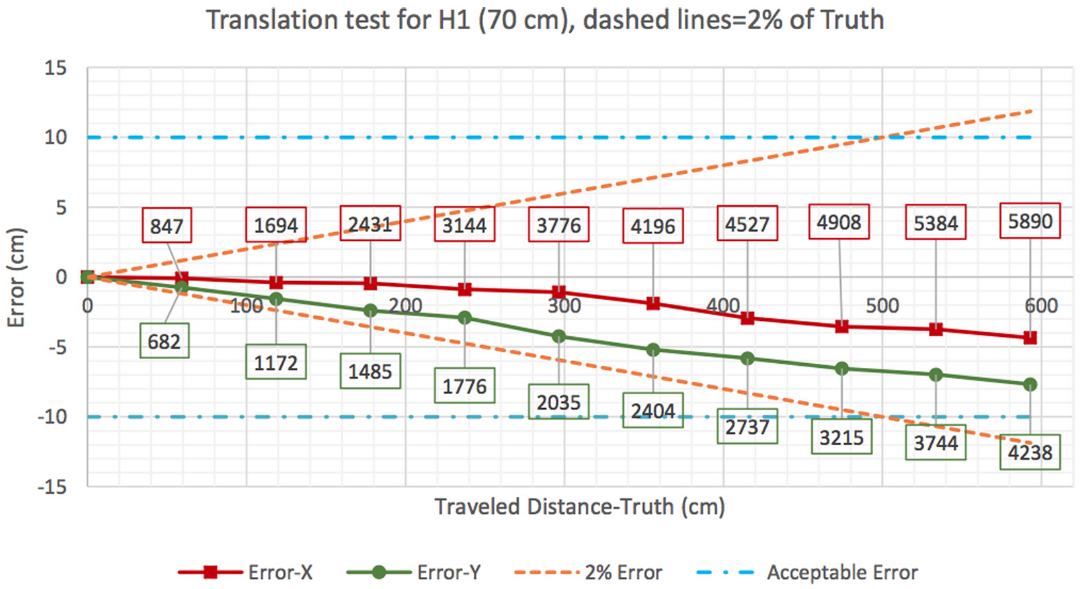
Positional accuracy of better than 2% (of the total traveled distance) for most of the cases and 4% for all the cases studied and angular accuracy of better than 2% (of absolute cumulative changes in orientation) were achieved with this method.
This study provides a robust and accurate tracking framework that not only can be integrated with the current C-arm joint-tracking system (i.e. TC-arm) but also is capable of being employed for similar applications in other fields (e.g. robotics).
Citation
Esfandiari H, Lichti D, Anglin C.
Single-camera visual odometry to track a surgical X-ray C-arm base.
Proc Inst Mech Eng H. 2017 Dec;231(12):1140-1151.